
EPFL’nin LASA ekibi, koldan ayrılıp parmaklarının üzerinde sürünerek nesnelere giden bir “robot el” geliştirdi. Nature Communications’ta 20 Ocak 2026’da yayımlanan çalışmada elin beş ve altı parmaklı iki versiyonu tanıtılıyor. 16 cm çapındaki avuç yapısı simetrik; yani hem üst hem alt yüzeyinden kavrayabiliyor. Sistem, sırayla üç nesneyi toplayıp elindekileri bırakmadan tabana geri bağlanabiliyor; günlük nesneler üzerinde 33 farklı insan kavrama türünü taklit edebiliyor ve 2 kilograma kadar yük taşıyabiliyor.
Nasıl çalışıyor?
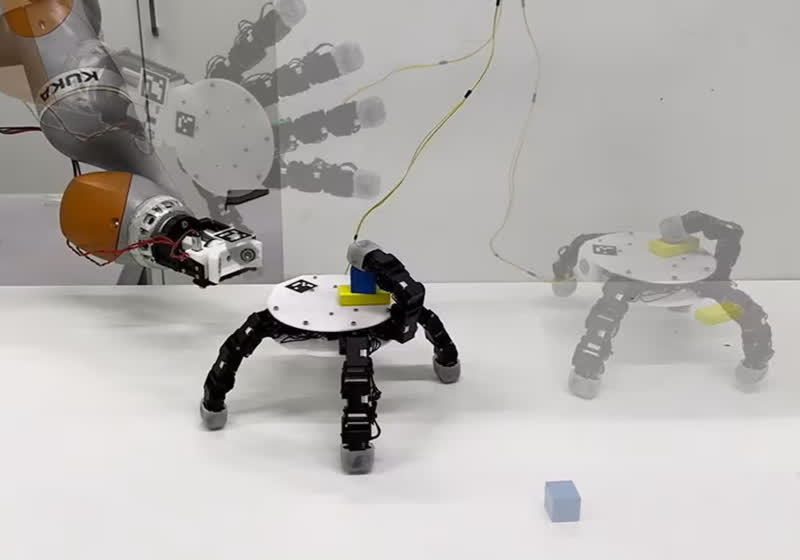
El, manyetik bir bilek bağlantısından ayrılıyor ve parmaklarını iki yöne de kıvırabilen “bacaklar” gibi kullanarak ilerliyor. Parmak yerleşimi ve biçimi, genetik algoritmalar ve MuJoCo simülasyonlarıyla optimize edilmiş. EPFL’nin önceki “Handcrawler” gösteriminde sistem manuel kontrolle sergilenmişti; ekip daha sonra dış konum takibiyle ayrılma–sürünme–kavrama–yeniden bağlanma döngüsünü uçtan uca otonom çalıştırdığını belirtiyor.
Ne işe yarayacak?
Bu yaklaşım, klasik robot kollarının erişemediği dar alanlara uzanmayı, birden fazla nesneyi aynı anda veya sırayla toplamayı ve sıkışık ortamlarda daha az manevrayla iş yapmayı mümkün kılıyor. Araştırmacılar; endüstriyel denetimler, boru içi bakım, depo operasyonları ve arama-kurtarma gibi alanlarda kullanım potansiyeline dikkat çekiyor. EPFL, bu simetrik ve tersine çevrilebilir tasarımın gelecekte protezlerde de uyarlanabileceğini söylüyor.
Kaynak: www.techspot.com