Harvard SEAS ekibi, yumuşak robotların bükülme, dönme ve kavrama hareketlerini daha tasarım aşamasında “koda döken” yeni bir 3D yazdırma yöntemi geliştirdi. Advanced Materials’te yayımlanan çalışmada, hareketi sonradan eklemek yerine malzemenin içine gömülü kanallarla programlamak mümkün oluyor. Böylece kalıplama ve kat kat montaj gibi yavaş süreçlerin yerini tek seferde üretim alıyor.
Yöntem nasıl işliyor?
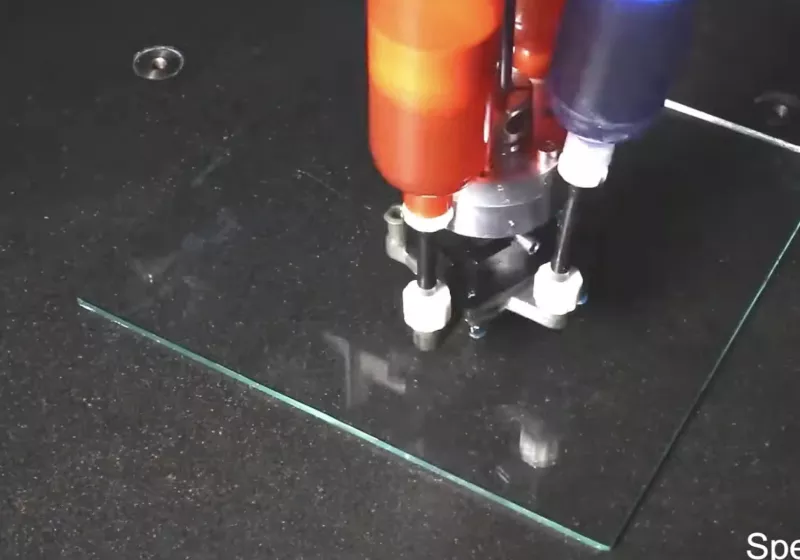
“Döner çok malzemeli” yazdırma tek bir nozilden iki malzemeyi aynı anda çıkarıyor: Esnek bir dış kılıf ve sonradan uzaklaştırılan geçici bir çekirdek. Nozulun dönme hızı, tasarımı ve yazdırma yolu hassas biçimde ayarlanarak iç kanalların yönü, şekli ve hacmi programlanıyor. Dış kılıf sertleştikten sonra çekirdek yıkanarak çıkarılıyor; geride hava verildiğinde öngörülen biçimde bükülüp şekil değiştiren boşluklu kanallar kalıyor.
Ekip, tek parça ve kesintisiz yollarla yazdırdığı iki örnekle yaklaşımı gösterdi: Şişirildiğinde çiçek gibi açılan spiral bir aktüatör ve nesneleri nazikçe saran parmaklı bir kavrayıcı. Bu süreçte kalıp yok; yapı doğrudan yazdırılıyor, hareket de anında programlanıyor. Geleneksel yöntemlere göre tasarım–prototip döngüsü belirgin şekilde hızlanıyor.
Çalışmayı lisansüstü öğrenci Jackson Wilt ile şu anda Stanford’da öğretim üyesi olan eski doktora sonrası araştırmacı Natalie Larson yürüttü; proje, Jennifer A. Lewis’in laboratuvarında geliştirildi. Harvard’ın duyurusuna göre yöntem, cerrahi robotlardan insan vücuduna uyumlanan giyilebilir yardımcı sistemlere kadar birçok alanda kullanılabilecek programlanabilir yumuşak yapılara kapı aralıyor.
Bağlam açısından: Yumuşak robotlar, kırılgan nesneleri güvenle tutmak ya da karmaşık ortamlarda ilerlemek gibi işlerde hızla öne çıkıyor. Örneğin MIT–Stanford ortaklığının “sarılıp büyüyen” asma ilhamlı kavrayıcısı, ağır ve hassas objeleri nazikçe kaldırabiliyor. Harvard’ın tek adımda programlanabilir kanalları, bu eğilimi üretim tarafında daha modüler ve hızlı kılmayı hedefliyor.
Kaynak: www.techspot.com







